This article again covers a topic related to my wife’s family farm, but this
time, instead of exporting milking data to Grafana, I will detail my usage of Michael
Stapelberg’s amazing
gokrazy project, which made it possible to reliably
develop Go software to control fences around the farm.
Fences and Cows 🐄
The farm is distributed on 2 sites, and on each site there are rather long
electric fences, in which the cows happily pasture during the day (and for the
heifer’s fence, also during the night).
To prevent the cows from escaping the fences and e.g. eat our neighbour’s grass
(which is always greener, as we all know), the fences are electrified ⚡️ with
high voltage (6000V) impulsions every second.

While all of this works really well, because the fence electrification equipment (one per fence) is located in the main buildings of both site, conducting maintenance on the fence was quite cumbersome as you had to walk sometimes up to 1 Km to the main building to pull the plug of the electrification equipment.
That’s when I thought that adding a connected relay to the equation could help simplify their work, as it would enable them to stay on the maintenance site, remotely toggle the fence off, and start working on the fence.
RC Fence and User Experience
For ease of user experience, I didn’t want my wife and her family to have to install an app to control the fence, as it would have incurred sharing user/password among 5 people, showing them how to use the app, relying on some manufacturer’s cloud to (reliably) work, etc.
However, as I had already enjoined them to use Telegram (to receive alerts related to their Biogas plant), I thought it would be cool to create a Telegram Bot to control the fence. It comes with several advantages:
- ease of use: you only have to open the chat of the Telegram Bot for the corresponding fence, and you can start to interact with the fence
- security: I only let authorized Telegram
user_idcommand the bot status, and authentication (theuser_id) comes granted from Telegram - reliability: the only breaking point which I do not control is the Telegram Bot API, but in multiple years of using it, I never had an incident
With that said, I started to work on writing the Go software for the bot, which you can check at clementnuss/fence-bot
With relatively few lines of code, I got to something simple to understand and use:
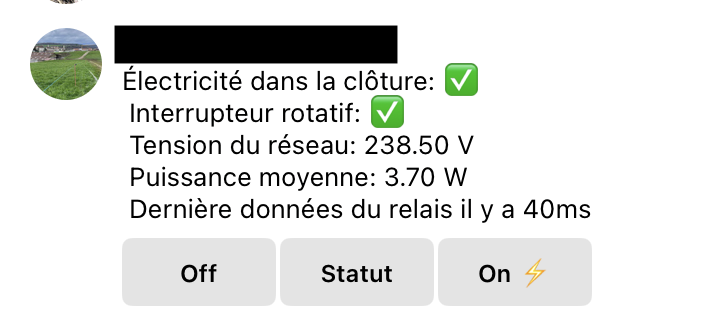
The three buttons permit to turn on/off the fence, and to manually enquire a status update from the switch.
Where to run fence-bot code ?
That’s where gokrazy comes into play! Written by
Michael Stapelberg, it makes it reliablye,
simple and mostly fun to write and upload Go code to a Raspberry Pi!
Gokrazy permits to focus on the application logic, written in Go, so that you
don’t have to lose time writing systmed services to make sure the bot starts
on system boot, etc.
And to give you and idea of how simple it is to update a running code on your Raspberry Pi, the only command you need to run is
gok --instance gok-biogas update
Another immensely simple and useful feature of gokrazy is importing another Go module into your project. For this project, I needed to use an MQTT server, and had I not used gokrazy, I would probably have hosted that on my private Kubernetes cluster, but to the detriment of latency and reliability.
Thanks to gokrazy however, I imported a lightweight Go-written MQTT server (namely, wind-c/comqtt) to my instance configuration, as simply as doing
gok --instance gok-biogas add github.com/wind-c/comqtt/cmd/single
gok --instance gok-biogas update
And with that done, I had a local MQTT server running on my Raspberry Pi, so
that the only requirement for fence-bot to work is a reliable internet
connection to the Telegram API, and nothing more.
fence-bot code
Inspired by Michael’s project to manage his MQTT-driven smart house, I started writing the code to control my MQTT-driven relay (a Shelly Plus 1 PM), which in the end turned out quite simple: I only had to create 2 Go structs which I used to parse the status update from the mqtt relay, and and a function to publish to a specified topic to toggle on/off the relay (and thereby the fence).
type shellyInputStatus struct {
Id int `json:"id"`
State bool `json:"state"`
LastUpdate time.Time
}
type shellySwitchStatus struct {
Output bool `json:"output"`
Voltage float64 `json:"voltage"`
Current float64 `json:"current"`
AveragePower float64 `json:"apower"`
LastUpdate time.Time
}
func handler(client mqtt.Client, message mqtt.Message) {
switch message.Topic() {
case shellyPrefix + "status/input:0":
err := json.Unmarshal(message.Payload(), &stat.InputStatus)
if err == nil {
stat.InputStatus.LastUpdate = time.Now()
}
case shellyPrefix + "status/switch:0":
err := json.Unmarshal(message.Payload(), &stat.SwitchStatus)
if err == nil {
stat.SwitchStatus.LastUpdate = time.Now()
}
}
}
func mqttCommandSwitch(status bool) { // command the switch status
client.Publish(shellyPrefix+"command/switch:0", 0, false, boolToStr(status))
}
func mqttStatusUpdate() { // enquire a status update
client.Publish(shellyPrefix+"command", 1, false, "status_update")
}
With that being done, I wrote the code for the Telegram Bot API with the
telebot package, which seems actively
maintained and boasts 3.7k GitHub stars:
func bot() {
b, err = telebotv3.NewBot(settings)
if err != nil {
log.Fatal(err)
return
}
statusButton := telebotv3.InlineButton{Unique: "status", Text: "Statut"}
on := telebotv3.InlineButton{Unique: "on", Text: "On ⚡️"}
off := telebotv3.InlineButton{Unique: "off", Text: "Off"}
m = b.NewMarkup()
m.InlineKeyboard = append(m.InlineKeyboard,
[]telebotv3.InlineButton{off, statusButton, on})
b.Handle("/start", func(c telebotv3.Context) error {
return c.Send(fenceStatus(), m)
})
b.Handle(&statusButton, func(c telebotv3.Context) error {
mqttStatusUpdate()
time.Sleep(200 * time.Millisecond)
_, _ = b.Edit(c.Message(), fenceStatus(), m)
return c.Respond(&telebotv3.CallbackResponse{})
})
b.Handle(&on, func(c telebotv3.Context) error {
return commandSwitch(true, c)
})
b.Handle(&off, func(c telebotv3.Context) error {
return commandSwitch(false, c)
})
b.Start()
Et voilà! my little fence-bot was ready to run ! And to this day (11th of May
2024), it has been in use for over 2 months without any interruption 🙃
And shall you be interested in replicating that setup for yourself, you will find the Go code for this project at clementnuss/fence-bot